








知遠戰略與防務研究所/威遠 編譯自:俄羅斯《軍隊文集》月刊2017年第6期
目前,世界上很多發達國家都在進行機器人系統技術方案的研究。美國從上世紀90年代末就首先開始了軍用機器人技術裝備的研制,當時制定了“未來部隊”計劃。在該計劃框架內,撥出了大量資金——225億美元用于軍用機器人技術裝備的研制。另一個發達的強國日本,將機器人技術裝備列為國家七大優先發展方向之一,目標是成為機器人技術領域的世界領導者。歐盟在數年前也加入了這一競賽,通過了價值數十億的軍用機器人技術裝備計劃。
中國官方雖然沒有宣布在該領域的計劃,但根據關于具體項目的個別報道可以發現,其也在研制軍用機器人以及其它類型的機器人技術裝備。韓國也在落實機器人技術裝備發展計劃,優先戰略方向是為個別訂貨方提供專業技術裝備,如為近東國家提供機器人監視系統。
俄羅斯也正在軍用機器人技術領域開展研究工作。值得關注的是,我們的個別成果完全達到了世界級的水平,但總體上,目前的研制水平還不夠,尤其是在軍用機器人領域,這在世界武器更新換代的背景下讓人非常擔憂。
如上所述,美國近幾十年,也就是2030年前最重要的武裝力量發展規劃是“未來作戰系統”計劃(Future Combat System — FCS),在該計劃框架內要研制數種地面機器人武器系統。其中包括“未來作戰系統”計劃的第四部分——“地面遙控車輛”——UGV(Unmanned Ground Vehicles-地面無人車輛)。
據軍事資源(Militari Resurs)雜志(2015年第11期)報道,未來,(美國)將研制:
武裝機器人車輛(ARV-Armed Robotic Vehicle):偵察(偵察,監視和目標獲取-Reconnaissance,Surveillance and Target Acquisition-RSTA)和突擊(Assault)方向;
多功能支援車輛(Multifunctional Utility Logistics and Equipment platform-MULE):偵察,工兵和運輸車輛;
小口徑無人車輛(Small Unmanned Ground Vehicle-SUGV)。
近年來局部戰爭經驗顯示,該計劃已經開始付諸實踐。其中,從2010年開始,工兵機器人PackBot(圖1)開始參與在阿富汗和伊拉克的軍事行動。該機器人重20千克,履帶式底盤,能夠越過障礙和崎嶇地形。機器人在一天之內能夠實施600至700次行動,其功能包括區域掃雷,鋪設線路,參與戰斗行動。

圖1. PackBot工兵機器人外形布局圖
iRobot公司與波士頓大學聯合研制了一種機器人,其主要任務是尋找敵人的狙擊手。設備名稱為REDOWL(Robotic Enhanced Detection Outpost With Lasers)(圖2)。該機器人能夠搜尋狙擊手并通過內置攝像頭實施快速拍攝。機器人配備了激光測距儀,熱視儀,音源標定機,4個獨立攝像機和1個GPS接收機。機器人可根據射擊聲音發現狙擊手的位置,概率達0.9。REDOWL(紅色貓頭鷹)的軟件能夠過濾虛假的聲音信號。
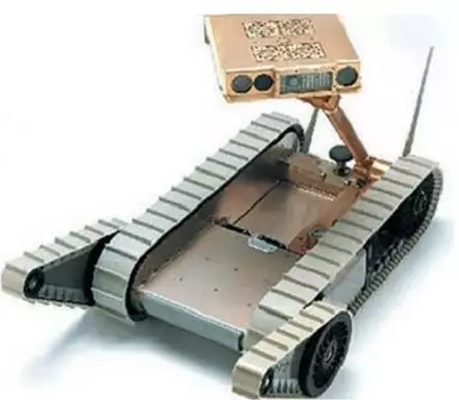
圖2. REDOWL偵察機器人外形布局
需要指出的是,作戰行動一開始,美軍就在伊拉克境內使用了戰斗機器人。Talon機器人上安裝了5.56毫米口徑M249輕機槍或者7.62毫米口徑M240機器人(圖3)。引導系統包括4個攝像頭和1個夜視儀。由操作員從指揮所實施控制,并定下最終決心。

圖3. Talon戰斗機器人外形布局
Talon機器人的俄制類似產品是MRK-27-BT機器人(圖4),由鮑曼莫斯科技術大學應用機器人技術設計所研制。該機器人基于機動履帶式底盤,配備了系列武器,包括兩部“熊蜂”火焰槍,1部7.62毫米口徑“佩徹涅格人”機槍,2部火箭-突擊榴彈和6部發煙榴彈。用于對預設防御的建筑工事和裝甲目標實施火力毀傷。引導系統包括2部攝像機,借助于2個操縱桿可在200米范圍內對其進行有線控制,或者在500米內實施無線電操縱。該機器人屬于小型機器人戰斗車輛。

圖4. MRK-27-BT戰斗機器人外形布局
同時,美國計劃在重量達5至6噸的6×6或者4×4輪式平臺的基礎上,研制重型機器人戰斗車輛ARV(圖5),包括兩種方案:ARV-RSTA用于遂行偵察任務,ARV-ASSault用于完成火力任務并保障部隊的防護。

圖5.ARV重型機器人戰斗車輛外形布局
中型機器人戰斗車輛SMSS(Squad Mission Support System)是保障“班”級分隊的交通工具,基于3×3輪式平臺(圖6)。車重1814千克,能夠以40千米/小時的速度穿越起伏劇烈地形,運輸物資的重量約為450千克,可克服高度達56厘米的梯形障礙,寬度達70厘米的溝壕。道路儲備里程約為160公里,崎嶇地形情況下則約為80公里。

圖6.SMSS中型機器人戰斗車輛外形布局
重型機器人戰斗車輛的試驗型“Crusher”(圖7)基于6輪的平臺研制而成。重型機器人戰斗車輛在崎嶇地形上具有高通過能力,在戰斗質量達6.5噸的情況下,可在7秒內將行駛速度提高至42公里/小時的最快速度。它可由位于數公里以外的操作員進行遙控。

圖7.“Crusher”遙控車輛:a-全視圖;b-激光測距儀和攝像機;c-可伸縮套管天線桿
此外,利用太空無線電導航系統“navstar(導航星)”(GPS),或者根據車載計算機電子存儲器中存儲的預定路線,重型機器人戰斗車輛能夠在起伏地形上從一個地點獨立轉移至另外一個地點。如果途中遇到障礙,車輛自己能夠選擇迂回道路。車體由鋁合金構成,而框架結構使用了鈦。車輛前部安裝了鋼制保險杠,能夠承受障礙物的撞擊,比如像小樹這樣的障礙物。帶獨立懸掛的6輪底盤能夠保證在1個或者2個輪子出現故障的情況下,實現原地 360度調動和轉彎。車輛離地間隙可以在0-0.56米之間調整。
動力裝置是柴電混合發動機,實際使用中可保證無噪音運行。每個車輪上都安裝了車載電動機。根據不同的速度、載重和地形條件,充滿電的蓄電池在不補充充電的情況下可行駛 3-16公里。車輛最大載重量為3.6噸。
研發人員認為,行動時,部隊戰斗隊形中的重型機器人戰斗車輛可用作偵察車。因此,該車輛的一種布局方案就安裝了可伸縮套管天線桿,上面固定了激光測距儀傳感器和攝像機(圖7)。此外,該車還能配備自動炮或者大口徑機槍。目前正在研發該車自主和遙控行駛的能力。
美國現在正在研制中型機器人戰斗車輛。其中美國海軍研究所(Office of Naval Research)和美國國防部高級研究計劃局(DARPA)在完成“地面戰術遙控車”(TUGV-Tactical Unmanned Ground Vehicle)計劃框架內,撥款研制名為“角斗士”的車輛。洛克希德·馬丁公司和卡內基梅隆大學實驗室在研究該車試驗型方面展開競爭。
“角斗士”中型機器人戰斗車輛是一種遙控戰斗支援車,能夠在潛在危險區域實施搜索-偵察行動:在可能遭到射擊的情況下,以及存在化學、細菌和輻射沾染威脅的情況下。與其它類似型號相比,該設備的主要優勢是它的裝甲防護。
地面遙控戰斗車輛的設計人員遇到了一個兩難問題:是否要將其視為一種不需要任何專門防護的兵器,還是要使用裝甲防護使其免受輕武器子彈,炮彈和地雷彈片的損壞。第一種情況下,車輛的成本會更低,機動性更強,但很可能會在遭受常規武器首次射擊后便遭到摧毀。第二種情況下,成本提升,車輛戰斗重量增加,但機動性能降低,需要更強的發動機。
中型機器人戰斗車輛的研發人員采用了第二種方案,使用了車體裝甲。能夠承受口徑7.62毫米的輕武器的子彈射擊。第一輛原型車采用履帶式車體,配備了7.62毫米機槍,質量-體積指標要比之后的方案要小得多。
第二種方案的尺寸為1.78×1.12×1.35m3。根據配備不同,車輛的戰斗重量在730千克至1000千克。車上安裝了SWARM(Stabilised Weapon And Reconnaissance Mount)遙控穩定系統,包括用于固定自動輕武器的裝置,以及晝夜視瞄準具。此外,車上還安裝了發煙榴彈發射裝置、貨箱、偵察及其它設備。
該裝備的其中一種方案上安裝了12部采用了Metal Storm技術的多管投射裝置(圖8)。該裝置配備的電子系統使其能夠以很短的時間間隔實施發射。據研究人員稱,Metal Storm 發射40毫米榴彈的速度可以達到20000發/分。控制系統中配備了視頻和紅外攝像機,能夠在夜間和煙幕干擾條件下實施監視。

圖8.帶多管榴彈裝置的“角斗士”戰車方案
“角斗士”中型機器人戰斗車輛配備了柴油發動機,車載電動機依靠由柴油發電機充電的蓄電池供電。為保證車輛行駛的無聲性和隱蔽性,行駛過程中可關閉柴油機,僅使用蓄電池。公路最高行駛速度為26千米/小時,崎嶇地形約為12千米/小時。車輛能夠克服寬1米的壕溝,深70厘米的水障。設備操控由操作員借助操縱桿實施。
目前,該遙控車輛正在進行全面野外試驗。一旦試驗成功結束,美國國防部計劃進行采購。
軍事專家認為,研制自主遙控戰斗模塊(DBM)是武器系統機器人化的重要方向之一。遙控戰斗模塊(圖9)能夠使乘員在受到裝甲防護的情況下實施射擊。美國制定了專門的戰車乘員保護計劃,Kongsberg公司(挪威)生產的M151Protector戰斗模塊和XM101通用遙控戰斗模塊(CROWS)己經開始供貨。

圖9.遙控戰斗模塊外形布局
其它國家對遙控戰斗模塊也表現出了興趣。比如,荷蘭軍隊為本國的巡邏車(PPV)配備了加強防護裝置,在遙控戰斗模塊中使用了穩定器和基于光電變像管的R-400 Raven夜視系統。加拿大軍隊一直使用Rheinmetall公司生產的,安裝在中型和重型裝甲車輛上的Nanuk戰斗模塊。
很多訂貨人對遙控戰斗模塊的構成提出了更高的要求,尤其是要求使用熱視儀和穩定系統。便于在崎嶇難行的道路上行駛時毀傷目標。部分訂貨方還要求戰斗模塊配備激光測距儀或者激光目標指示器,以及目標自動跟蹤設備。這使得指揮員使用液晶顯示屏或者手動控制器就能讓武器瞄準目標。
出現了為遙控戰斗模塊配備重型武器的趨勢,比如,安裝在穩定平臺上的12.7毫米重機槍或者自動榴彈發射器。還可能使用反坦克導彈。
大部分遙控戰斗模塊都屬于獨立平臺,既能安裝在履帶戰斗技術裝備上,也能安裝在輪式戰斗技術裝備上(圖10)。

圖10.安裝在戰斗技術裝備上的遙控戰斗模塊:a-履帶式;b-4×4輪式;c-6×6輪式
遙控戰斗模塊的高射擊精度可保證在實戰中首發命中目標,改進的圖像顯示系統使得指揮員能夠在開火前監視目標的移動(比如,通過安裝在頭盔上的顯示器)。這些系統還能夠借助光電設備,在不瞄準的情況下,監視非危險目標。
由于對可能出現目標地段的遠距離監視和掃視平臺穩定,遙控戰斗模塊在遂行偵察任務時非常有效。主要專家認為,遙控戰斗模塊改進的方向將是:研制安裝在戰術裝甲戰車、裝甲運輸車和卡車上的一體化系統。
遙控戰斗模塊可能的改進方案包括:環視全景監視系統,指揮員穩定瞄準具,激光報知系統,符合STANAG4569標準的現代化彈道防護,配備反坦克導彈,指揮員和瞄準手攝像機,以及配備發煙榴彈發射裝置(圖11a)。比如,用于General Dynamics Land Systems公司(加拿大)為加拿大軍隊生產的8×8輪式輕型裝甲車(LAV)的Nanuk戰斗模塊。模塊將裝備7.62毫米機槍(圖11b),發煙榴彈發射裝置,彈道計算器,目標瞄準和開火控制器,用于提升首發命中目標概率的提前角校正設備。

圖11.改進型戰斗模塊:a-發煙榴彈發射裝置;b-帶7.62毫米機槍的模塊
瞄準系統安裝在遙控戰斗模塊的左側,包括彩色攝像機,電視攝像機和對眼睛無害的激光測距儀。使用帶兩個手動控制器的顯示屏用于瞄準目標。
目前,基于人工智能技術的瞄準系統研制方案被認為是先進的。當前,人工智能技術的發展包括以下幾種思路:
1.基于與人腦運行類似原理的神經元鏈路,可用于識別圖像。
2.改進算法,機器人通過程序突變、融合(交換部分程序)和測試,建立完成某一目標任務的程序。
3.計算設備能夠利用現實世界的術語和客體,與之交互并能夠使用“遠”,“近”,“很近”三種語言變化。
這些讓軍事研究人員有理由相信,到2025至2035年間,人工智能將能夠與人自身的能力不相上下,之后甚至能超越人類。
由此可見,機器人武器系統的戰術使用和國內外正在進行的研究,解釋了俄聯邦陸軍對武器和軍事技術裝備機器人化的要求。
該領域正在解決的任務可能包括:
建立軍用機器人技術裝備領域的科學基礎,研究基本的技術和工藝方案;
制定技術方案,改進現有武器和軍事技術裝備,保證其具備無人運用的能力;
研制軍用和專業戰斗、保障機器人系統;
研制專用系統以及在武器自動化和智能化方面功能完備的裝備。
需要強調的是,研制陸軍軍用和專業機器人技術系統不是“趕時髦”,而是時代的必然要求,完成這一任務將能夠在戰斗過程中保護軍人的生命。(全文完)


