








2018年8月15日:為期5天的2018世界機器人大會如火如荼地在京召開,大會匯集了自聯(lián)合國工業(yè)發(fā)展組織(UNIDO)、IEEE機器人與自動化學會(IEEE RAS)、世界工程組織聯(lián)合會(WFEO)等21家國際機構的專家,和優(yōu)傲、ABB、發(fā)那科、新松、哈工大機器人集團、中瑞福寧等160余家國內外知名企業(yè)將全面最新的成果及應用。
作為協(xié)作機器人行業(yè)的領導者,丹麥優(yōu)傲機器人在世界機器人大會上帶來了一系列協(xié)作機器人應能用。除了畫像、咖啡機等有趣味性的觀眾互動應用之外,優(yōu)傲一直以來致力于通過協(xié)作機器人幫助各個行業(yè)、不同規(guī)模的企業(yè)實現(xiàn)自動化:無論是廣泛應用于汽車行業(yè)的螺絲擰緊應用,還是在包裝物流行業(yè)漸成流行的3D視覺分揀,甚至搭配視覺手套,讓機器人仿佛人手一般抓取不同規(guī)格和形狀的物品,迅速送達指定位置。協(xié)作機器人都可以實現(xiàn)。
所謂外行看熱鬧內行看門道,一覽優(yōu)傲協(xié)作機器人工作站,一起探索協(xié)作機器人更多的可能性,找到最適合你的應用場景。
應用1: UR機器人在Pickit3D視覺引導下抓取無序復雜工件
行業(yè): 托盤物料分揀,裝配和機加工上下料、碼垛拆垛等。
工作流程:
1、連接UR機器人和Pickit3D視覺;
2、校準UR和Pickit 3D視覺的相對位置;
3、示教Pickit3D視覺的工作區(qū)域;
4、拍照示教3D視覺被抓取工件;
5、添加夾爪抓取和放置指令到標準程序;
6、精準抓取和快樂工作。
技術描述:
UR機器人體積小,部署靈活,編程簡單,定位精度高,穩(wěn)定性好。結合Pickit強大的3D視覺和人工智能,及各種夾爪,可以在短時間內集成出一套固定成本的,即插即用的,靈活柔性的抓取解決方案。客戶一次性投入,無需專業(yè)編程人員,一切操作手動示教即可。
無論客戶工件是標準形狀如圓形、方形等、還是復雜異形;無論現(xiàn)場光照穩(wěn)定、還是燈光變化無常;無論是工件是金屬、塑料還是木頭、紙質;也無論工件是反射性,還是透明性,亦或任何顏色;無論工件是大的包裝箱、還是小于10mm厚的面板、還是小于30mm的零件,UR機器人都能精準抓取,迅速送達
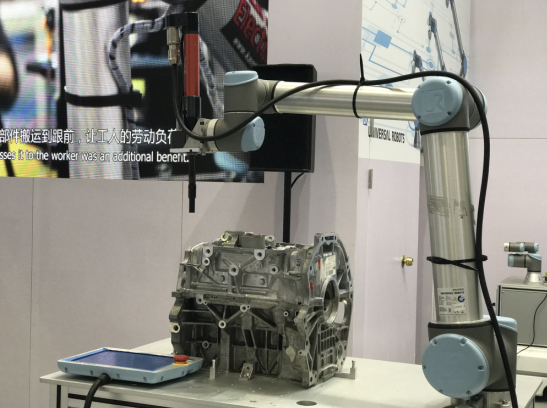
應用2: UR機器人汽車發(fā)動機螺絲擰緊
行業(yè): 服務器、汽車座椅和發(fā)動機螺絲擰緊等領域
工作流程: UR機器人搭配視覺控制擰緊槍系統(tǒng)
1、首先視覺系統(tǒng)拍照得到螺絲孔的位置,通過socket通訊將位置數(shù)據(jù)傳輸給UR機器人,UR機器人引導擰緊槍批頭精準的插入到螺絲孔中;
2、然后UR機器人發(fā)送給擰緊槍啟動信號,擰緊槍轉動到達指定的扭矩值;
3、最后擰緊槍反饋完成信號,UR機器人再返回到安全等待位置。
技術描述:
UR機器人由于體積小、部署靈活的特點可以非常方便的安裝在現(xiàn)場,只需占用一名作業(yè)員站立的空間。并且由于UR機器人自帶安全保護功能,不需要外加防護欄,機器人本體碰撞到人會自動停止,完美解決了工廠空間有限,設備部署緊湊問題。UR機器人六關節(jié)的超高自由度,工作空間是一個完整的球體,可以滿足發(fā)動機在各個方向擰緊螺絲的需求。UR機器人替代人工,承受住擰緊槍巨大的反作用力,大大減少了人工操作時,需要承受的過渡勞力。
應用3: UR機器人畫像應用
行業(yè): 主要用于創(chuàng)意應用和藝術展示
視頻:
工作流程:首先由視覺系統(tǒng)拍攝人物頭像的圖片,然后由二次開發(fā)的軟件系統(tǒng)將圖片轉換成線稿,算法處理后的線稿就是UR機器人的運動指令集,然后將這些指令通過socket通訊發(fā)送給UR機器人,它就可以開始做畫了。
技術描述:UR機器人由于體積小、部署靈活的特點大大節(jié)省了現(xiàn)場布局空間。并且由于UR機器人自帶安全保護功能,不需要外加護欄,機器人本體碰撞到人就會自動停止。UR機器人獨有的UR+平臺提供了免費、開放的開發(fā)平臺,可按客戶的需求實現(xiàn)機器人的各種應用功能。UR機器人標配的Modbus tcp、Profinet、Ethernet 和 TCP/IP等通訊協(xié)議,也非常方便實現(xiàn)和第三方產品的通訊。

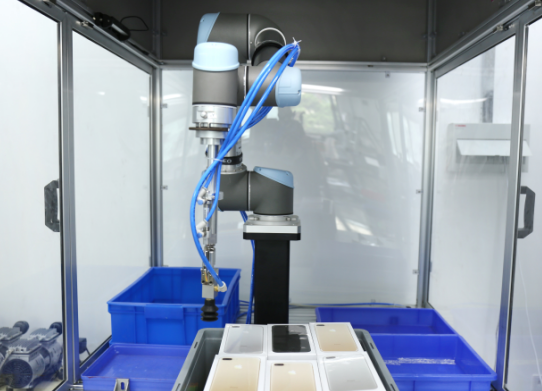
應用4:UR3機器人對混雜貨品進行分類
行業(yè):主要應用在物流、電商、食品等領域。z
視頻:
工作流程描述:
1、 Mech-Eye智能相機獲取隨意堆放的混雜貨品(6種貨品)的圖像信息。
2、 根據(jù)圖像信息,3D視覺系統(tǒng)將對貨品進行識別、定位。
3、 根據(jù)識別結果,搭配梅卡曼德軌跡規(guī)劃、碰撞檢測等AI算法的UR機器人將計算出最佳的抓取路線,對貨品進行抓取。
4、 UR機器人根據(jù)貨品的種類,將貨品放置到特定的料箱中。
5、 揀選分類動作結束后,UR機器人將自動回到安全位置,準備下一次動作。
技術描述:
應用廣泛
UR機器人通信穩(wěn)定、系統(tǒng)成熟,可拖動示教,可與梅卡曼德的視覺、控制等軟件無縫銜接,可識別不同形狀、不同顏色的多種物體,處理膠帶、反光、暗色、圖案等復雜情況,可運用到物流、電商倉庫、制造等行業(yè)中的拆垛、上料、混雜物體分類、訂單揀選、檢測定位等多個環(huán)節(jié)中去。
協(xié)作安全
UR機器人可以在無安全保護防護裝置、旁邊無人工操作員的情況下運轉操作,其安全系統(tǒng)獲得德國技術監(jiān)督協(xié)會的批準和認證,非常安全。
簡單、高效的部署
UR機器人開放式的特質,讓梅卡曼德的軟件可以和UR機器人非常方便、快捷地適配,無需編寫過多代碼,可極大化地節(jié)省部署成本,提高效率。
應用5:UR5機器人對散亂放置的金屬件進行上料
行業(yè):主要應用在制造業(yè)等領域。
視頻:
工作流程描述:
1、 Mech-Eye智能相機獲取隨意堆放的金屬件的圖像信息。
2、 根據(jù)圖像信息,3D視覺系統(tǒng)將對金屬件進行識別、定位。
3、 根據(jù)識別結果,搭配梅卡曼德軌跡規(guī)劃、碰撞檢測等AI算法的UR機器人將計算出最佳的抓取路線,避開障礙,對金屬件進行抓取。
4、 UR機器人將金屬件按照既定順序擺放。
5、 動作結束后,UR機器人將自動回到安全位置,準備下一次動作。
技術描述:
應用廣泛
UR機器人通信穩(wěn)定、系統(tǒng)成熟,可拖動示教,與梅卡曼德的視覺、控制等軟件無縫銜接,識別不同形狀、不同顏色的多種物體,支持反光、暗色等各種金屬零部件。可運用到物流、電商倉庫、制造等行業(yè)中的拆垛、上料、混雜物體分類、訂單揀選、檢測定位等多個環(huán)節(jié)中去。
協(xié)作安全
UR機器人可以在無安全保護防護裝置、旁邊無人工操作員的情況下運轉操作,其安全系統(tǒng)獲得德國技術監(jiān)督協(xié)會的批準和認證,非常安全。
簡單、高效的部署
UR機器人開放式的特質,讓梅卡曼德的軟件可以和UR機器人非常方便、快捷地適配,無需編寫過多代碼,可極大化地節(jié)省部署成本,提高效率。
靈巧便捷,無懼深箱
軌跡規(guī)劃算法搭配UR機器人,在實際應用場景中無懼深箱帶來的碰撞問題。



