









使用柔軟,靈活的機體可以讓機器人變得越來越好。有很多好的理由這樣做:具有合規(guī)性的機器人可以更安全地工作,并可以利用許多獨特的運動方式。
在最近一周左右的時間里,軟體機器人運動的兩種新方法已經(jīng)出現(xiàn):其中一種使用外部磁場,而另一種使用電場來驅(qū)動撲動翅片。
這種在中國杭州浙江大學(xué)開發(fā)的機器人射線是由電介質(zhì)彈性體制成的柔軟的翅膀推動的,當(dāng)它們施加電力時,它們會彎曲。介電彈性體響應(yīng)非常快,運動速度相對較大,但它們需要非常高的電壓(大約10千伏)才能使它們工作。傳統(tǒng)上,介電彈性體被覆蓋在絕緣層中,但是對于這種水生應(yīng)用,研究人員恰恰將所有絕緣層都浸沒在水中,依靠水作為電極和電場。
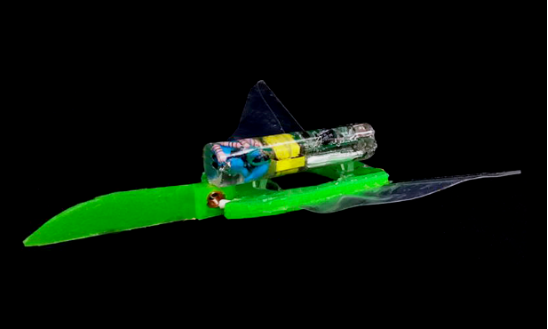
還有其他幾個原因,為什么這個設(shè)計是值得注意的。首先,它幾乎完全透明。身體、翅片、尾巴和彈性體肌肉完全透視。當(dāng)添加無電話操作所需的電子元件和電池時,效果會稍微損壞,但事實上,一個450毫安時的3.7伏電池將保持游泳在1.1固體3小時15分鐘,甚至可以攜帶一個小型相機。最大無限制速度為6.4厘米/秒,機器人魚類將在略高于冰點至近75°C的水溫中愉快地游泳。
這種機器人的整體效率與虹鱒魚相當(dāng),因為一條25厘米長的鱒魚消耗約0.03瓦特以10厘米/秒的速度移動。當(dāng)然,真正的鱒魚可以更快更動態(tài)地移動,但對于機器人而言,效率的生物學(xué)水平要高得多。研究人員還沒有準(zhǔn)備好為機器人提出任何具體的應(yīng)用,所以可能最好簡單地看一下這些技術(shù)的工作原理,為下一代留下實用的機器人。
同時,在北卡羅來納州立大學(xué),羅利,研究人員一直在研究一種更基礎(chǔ)的驅(qū)動技術(shù),具有軟機器人的潛力。他們并不完全是在機器人制造階段,但他們已經(jīng)設(shè)法將聚合物膜轉(zhuǎn)化為可以用磁場遠(yuǎn)程致動的肌肉。研究人員將鐵微粒引入到液體聚合物混合物中,然后向磁珠施加磁場,使微粒自身對準(zhǔn)平行鏈。當(dāng)干燥并切成條狀時,鏈條持續(xù)存在,并且當(dāng)向它們施加另一個磁場時,鏈條與之對準(zhǔn),并與聚合物一起使用。動的軟機器人")
通過改變磁場的強度和方向并調(diào)整聚合物的結(jié)構(gòu),研究人員能夠創(chuàng)建一套潛在的非常有用的軟執(zhí)行器,包括可以提升到其自身重量的50倍的懸臂,擴展和承包手風(fēng)琴結(jié)構(gòu),像肌肉一樣,帶有行波壓縮波的管作為蠕動泵。
這些執(zhí)行器似乎價格便宜,易于構(gòu)造,雖然它們只受到外部力量的響應(yīng)而受到約束,但它們將在您身體內(nèi)的微小機器人或者可部署的機器人結(jié)構(gòu)的上下文中工作得很好,不需要持續(xù)啟動。


