








2014年電影《機(jī)器紀(jì)元》的公映,似乎暗示著服務(wù)機(jī)器人正在由人機(jī)對(duì)抗朝人類(lèi)價(jià)值的延伸在轉(zhuǎn)變。不過(guò),醫(yī)療未來(lái),會(huì)是手術(shù)機(jī)器人的世界嗎?
動(dòng)脈網(wǎng)(ID:vcbeat) 作者:allenxu

近年來(lái),機(jī)器人不僅用于工業(yè)領(lǐng)域,在醫(yī)療系統(tǒng)也已得到推廣應(yīng)用。如大名鼎鼎的手術(shù)機(jī)器人(SurgicalRobot)的問(wèn)世不過(guò)短短10年,但同樣取得重大進(jìn)展。目前,關(guān)于機(jī)器人在醫(yī)療界中的應(yīng)用的研究主要集中在外科手術(shù)機(jī)器人、康復(fù)機(jī)器人、護(hù)理機(jī)器人和服務(wù)機(jī)器人方面。
其中,外科手術(shù)醫(yī)療機(jī)器人是目前應(yīng)用范圍最廣且最具前景,其提供的強(qiáng)大功能克服了傳統(tǒng)外科手術(shù)中精確度差、手術(shù)時(shí)間過(guò)長(zhǎng)、醫(yī)生疲勞、和缺乏三維精度視野等問(wèn)題。
實(shí)際上,手術(shù)機(jī)器人是一組器械的組合裝置。它通常由一個(gè)內(nèi)窺鏡(探頭)、刀剪等手術(shù)器械、微型攝像頭和操縱桿等器件組裝而成。據(jù)國(guó)外廠商介紹,目前使用中的手術(shù)機(jī)器人的工作原理是通過(guò)無(wú)線操作進(jìn)行的外科手術(shù),即醫(yī)生坐在電腦顯示屏前,通過(guò)顯示屏和內(nèi)窺鏡仔細(xì)觀察病人體內(nèi)的病灶情況,然后通過(guò)機(jī)器人手中的手術(shù)刀將病灶精確切除(或修復(fù))。
這種被國(guó)外科學(xué)家命名為MIS的系統(tǒng)是設(shè)計(jì)一切手術(shù)機(jī)器人的基礎(chǔ)。以目前各國(guó)醫(yī)院使用中的達(dá)·芬奇手術(shù)機(jī)器人為例,只要在病人皮膚表面開(kāi)一個(gè)極小的口子,將探頭塞進(jìn)體內(nèi),即可觀察到病人病灶所在位置,然后再用機(jī)器人手中的手術(shù)刀將其切除。
此外,手術(shù)機(jī)器人還可做器官修補(bǔ)、血管吻合或骨磨削等需要十分精細(xì)的手術(shù)。近年來(lái),手術(shù)機(jī)器人被用于做包括基因移植、神經(jīng)手術(shù)和遠(yuǎn)程手術(shù)等在內(nèi)的各種重要手術(shù),從而大大提高了危重病人的存活率。
那么,這么厲害的手術(shù)機(jī)器人發(fā)展情況如何?有哪些研發(fā)公司?又有哪些細(xì)分領(lǐng)域?國(guó)內(nèi)情況如何?未來(lái)將如何發(fā)展?別急,聽(tīng)我慢慢道來(lái)。

新興力量
今年3月初,谷歌最新發(fā)布的一則通告顯示,公司已同醫(yī)療器械公司強(qiáng)生達(dá)成合作協(xié)議,將共同研發(fā)一款機(jī)器人平臺(tái),來(lái)幫助醫(yī)生們進(jìn)行外科手術(shù)。
據(jù)悉,這款機(jī)器人手術(shù)平臺(tái)將有助于外科微創(chuàng)手術(shù)技術(shù)的的進(jìn)步,解決病人諸如修疤、疼痛、恢復(fù)期漫長(zhǎng)等方面的問(wèn)題。谷歌將為這款機(jī)器人平臺(tái)注入視覺(jué)系統(tǒng)和圖像分析軟件,能為外科醫(yī)生提供更好的視覺(jué)空間,并幫助其獲取其他相關(guān)信息。
到了5月中旬的時(shí)候,博實(shí)股份公告,公司擬投資1億元,設(shè)立全資子公司博實(shí)高端醫(yī)療裝備有限公司,同時(shí)擬通過(guò)博實(shí)股份或子公司投資微創(chuàng)外科手術(shù)機(jī)器人及智能器械項(xiàng)目。
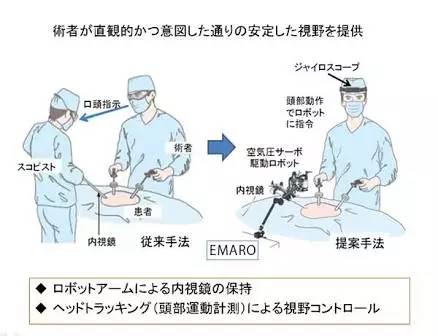
2015年7月31日的時(shí)候,東京工業(yè)大學(xué)和東京醫(yī)科齒科大學(xué)創(chuàng)立的RIVERFIELD公司宣布,內(nèi)窺鏡手術(shù)輔助機(jī)器人“EMARO:EndoscopeMAnipulatorRObot”將于2015年8月上市。
EMARO是主刀醫(yī)生可通過(guò)頭部動(dòng)作自己來(lái)操作內(nèi)窺鏡的系統(tǒng),無(wú)需助手(把持內(nèi)窺鏡的醫(yī)生)的幫助。東京醫(yī)科齒科大學(xué)生體材料工學(xué)研究所教授川嶋健嗣和東京工業(yè)大學(xué)精密工學(xué)研究所副教授只野耕太郎等人,從著手研究到EMARO上市足足用了約10年時(shí)間。
其作為手術(shù)輔助機(jī)器人,首次采用了氣壓驅(qū)動(dòng)方式。用自主的氣壓控制技術(shù),實(shí)現(xiàn)了靈活的動(dòng)作,在工作中“即使接觸到人,也可以躲開(kāi)其作用力”(只野)等,可保證高安全性。與馬達(dá)驅(qū)動(dòng)的現(xiàn)有內(nèi)窺鏡夾持機(jī)器人相比,整個(gè)系統(tǒng)更加輕量小巧也是一大特點(diǎn)。該系統(tǒng)平時(shí)由主刀醫(yī)生由頭部的陀螺儀傳感器來(lái)操作,發(fā)生緊急情況時(shí),還可以手動(dòng)操作。可利用機(jī)體上附帶的控制面板的按鈕來(lái)操作。
它誕生的背景是,近年為取代對(duì)患者造成很大負(fù)擔(dān)的開(kāi)腹手術(shù),使用內(nèi)窺鏡的低創(chuàng)手術(shù)日益普及,就是以“切個(gè)1日元硬幣的口就可完成全部手術(shù)”(東京醫(yī)科齒科大學(xué)理事兼副校長(zhǎng)森田育男)為目標(biāo)的療法。
其典型代表是從在患者腹部切開(kāi)的小口插入鉗子和內(nèi)窺鏡、切除癌癥等的腹腔鏡手術(shù)。作為手術(shù)輔助機(jī)器人代名詞的美國(guó)直覺(jué)外科公司的“達(dá)芬奇系統(tǒng)(da Vinci Surgical System)”也是輔助內(nèi)窺鏡手術(shù)的系統(tǒng)。
雖然內(nèi)窺鏡手術(shù)日益普及,但內(nèi)窺鏡手術(shù)所需要的“助手難以保證”。尤其,在中小型醫(yī)院,助手不足據(jù)說(shuō)是一個(gè)嚴(yán)重的問(wèn)題。EMARO的問(wèn)世就是為了解決這一問(wèn)題。
據(jù)稱(chēng),RIVERFIELD的機(jī)器人鉗子系統(tǒng)已在作動(dòng)物和模擬內(nèi)臟器官的實(shí)驗(yàn),正在開(kāi)發(fā)第7號(hào)產(chǎn)品。預(yù)定2019年上市。最初考慮用于跟達(dá)芬奇系統(tǒng)一樣的疾病和手術(shù),原口充滿信心地表示“還要推廣到達(dá)芬奇系統(tǒng)無(wú)法應(yīng)對(duì)的領(lǐng)域”。超越達(dá)芬奇系統(tǒng)的日本產(chǎn)機(jī)器人誕生了。EMARO將成為第一塊試金石。

11月,專(zhuān)注于跨境醫(yī)療投資的基金匯橋資本集團(tuán)(“Ally Bridge Group”) 宣布,將以可轉(zhuǎn)債及認(rèn)股權(quán)證的形式對(duì)法國(guó)公司Medtech SA投資1500萬(wàn)美元。Medtech是一家創(chuàng)新的手術(shù)機(jī)器人系統(tǒng)開(kāi)發(fā)商,目前在泛歐證券交易所掛牌(股票代碼Euronext:ROSA)。
Medtech SA成立于2002年,總部設(shè)在法國(guó)南部蒙彼利埃,是一家全球領(lǐng)先的手術(shù)輔助機(jī)器人系統(tǒng)研發(fā)商。公司的旗艦產(chǎn)品ROSA腦部機(jī)器人已經(jīng)獲得歐洲、美國(guó)、中國(guó)、加拿大和澳大利亞的批準(zhǔn)。2014年7月,ROSA脊柱機(jī)器人也已獲得CE mark認(rèn)證,預(yù)計(jì)很快將會(huì)獲得美國(guó)FDA的批準(zhǔn)。
目前公司在全球范圍內(nèi)已安裝51個(gè)手術(shù)系統(tǒng),分布在全球各大頂級(jí)的神經(jīng)外科中心,包括克利夫蘭診所和馬薩諸塞州總醫(yī)院。目前,4家中國(guó)頂級(jí)的神經(jīng)外科醫(yī)院也已安裝ROSA機(jī)器人手術(shù)系統(tǒng)。
2013年,公司被全球增長(zhǎng)咨詢(xún)公司Frost & Sullivan評(píng)為神經(jīng)外科機(jī)器人類(lèi)別的 “歐洲年度企業(yè)”。
隨著機(jī)器人產(chǎn)業(yè)的快速發(fā)展,醫(yī)療機(jī)器人的發(fā)展已經(jīng)受到了全球高度關(guān)注,美國(guó)已經(jīng)把手術(shù)治療機(jī)器、假肢機(jī)器人、康復(fù)機(jī)器人、心理康復(fù)輔助機(jī)器人、個(gè)人護(hù)理機(jī)器人、智能健康監(jiān)控系統(tǒng)定為未來(lái)發(fā)展的六大研究方向。歐洲計(jì)劃將建立“Robotics for Health-care”網(wǎng)絡(luò),促進(jìn)醫(yī)療機(jī)器人在歐洲的發(fā)展和應(yīng)用。
一切事物的發(fā)展都有其源頭,在進(jìn)一步探索手術(shù)機(jī)器人之前,我們先來(lái)了解一下手術(shù)機(jī)器人從伊索到達(dá)芬奇的這段發(fā)展歷程。

從伊索到達(dá)芬奇
1994年出現(xiàn)的伊索被設(shè)計(jì)用來(lái)接受手術(shù)醫(yī)生的指示并控制腹腔鏡攝像頭。其三個(gè)階段的產(chǎn)品伊索-1000,伊索-2000和伊索-3000,充分體現(xiàn)了介入手術(shù)的特點(diǎn)。該機(jī)器可以模仿人手臂功能,實(shí)現(xiàn)聲控設(shè)置,取消了對(duì)輔助人員手動(dòng)控制內(nèi)窺鏡的需要,提供比人為控制更精確一致的鏡頭運(yùn)動(dòng),為醫(yī)生提供直接、穩(wěn)定的視野。至2014年,外科醫(yī)師應(yīng)用“伊索”已在全球做了超過(guò)7.5萬(wàn)例次微創(chuàng)手術(shù)。
1996年初,在伊索機(jī)器人的基礎(chǔ)上,開(kāi)發(fā)出了功能強(qiáng)大的視覺(jué)系統(tǒng),推出主從遙控操作的宙斯機(jī)器人。宙斯機(jī)器人分為Surgeon-side系統(tǒng)和Patient-side系統(tǒng),Surgeon-side系統(tǒng)由一對(duì)主手和監(jiān)視器構(gòu)成,醫(yī)生可以坐著操控主手手柄,并通過(guò)控制臺(tái)上的顯示器觀看由內(nèi)窺鏡拍攝的患者體內(nèi)情況。Patient-side由用于定位的兩個(gè)機(jī)器人手臂和一個(gè)控制內(nèi)窺鏡位置的機(jī)器人手臂組成。
達(dá)芬奇手術(shù)機(jī)器人是目前全球最成功及應(yīng)用最廣泛的手術(shù)機(jī)器人。其也代表著當(dāng)今手術(shù)機(jī)器人最高水平,它主要由3個(gè)部分組成:
1.醫(yī)生控制系統(tǒng)。
2.三維成像視頻影像平臺(tái)。
3.機(jī)械臂,攝像臂和手術(shù)器械組成移動(dòng)平臺(tái)。
實(shí)施手術(shù)時(shí)主刀醫(yī)師不與病人直接接觸,通過(guò)三維視覺(jué)系統(tǒng)和動(dòng)作定標(biāo)系統(tǒng)操作控制,由機(jī)械臂以及手術(shù)器械模擬完成醫(yī)生的技術(shù)動(dòng)作和手術(shù)操作。

投資觀點(diǎn)
在伊索機(jī)器人、宙斯機(jī)器人等前代機(jī)型的基礎(chǔ)上,美國(guó)視覺(jué)公司開(kāi)發(fā)的達(dá)芬奇手術(shù)機(jī)器人是目前全世界應(yīng)用最廣、技術(shù)最先進(jìn)的手術(shù)機(jī)器人。截止至2014年底,達(dá)芬奇手術(shù)機(jī)器人在全球已安裝了3266臺(tái),完成手術(shù)共計(jì)約57萬(wàn)例。
從全球來(lái)看,手術(shù)機(jī)器人產(chǎn)業(yè)化和技術(shù)突破都正處于甜點(diǎn)期,如達(dá)芬奇、Rewalk等優(yōu)秀科技企業(yè)涌現(xiàn),而部分國(guó)內(nèi)自動(dòng)化企業(yè)依托于科研院所的合作、引進(jìn)國(guó)外技術(shù)等資源,也在積極研發(fā)醫(yī)療機(jī)器人產(chǎn)品,處于產(chǎn)業(yè)化前期階段。業(yè)內(nèi)人士認(rèn)為,手術(shù)機(jī)器人雖然絕對(duì)空間更大,但外資份額過(guò)高并且處于絕對(duì)壟斷地位,競(jìng)爭(zhēng)格局短期不利于國(guó)內(nèi)企業(yè)。
但是,基于廣闊的市場(chǎng)前景和高技術(shù)壁壘,建議以科技股的視角看待手術(shù)機(jī)器人相關(guān)國(guó)產(chǎn)化企業(yè),重點(diǎn)關(guān)注積極研發(fā)和投資相關(guān)領(lǐng)域、打造醫(yī)用機(jī)器人平臺(tái)的公司 。
其實(shí)相比手術(shù)機(jī)器人,向醫(yī)療護(hù)理的方方面面滲透的其他領(lǐng)域醫(yī)療機(jī)器人更加值得投資,包括骨科機(jī)器人、胃鏡機(jī)器人、診斷機(jī)器人、牙科輔助機(jī)器人、護(hù)理機(jī)器人等等,這些品類(lèi)正在不同的領(lǐng)域里替代醫(yī)生經(jīng)驗(yàn)和人工護(hù)理,提高醫(yī)療效率和精確度,并產(chǎn)生了一批精專(zhuān)于某一細(xì)分領(lǐng)域的新公司。
細(xì)分領(lǐng)域
骨科手術(shù)機(jī)器人為手術(shù)機(jī)器人中的一個(gè)細(xì)分領(lǐng)域。比較著名的有: 1992年的ROBODOC手術(shù)系統(tǒng),由已并入CUREXO科技公司的Integrated Surgical Systems公司發(fā)布。
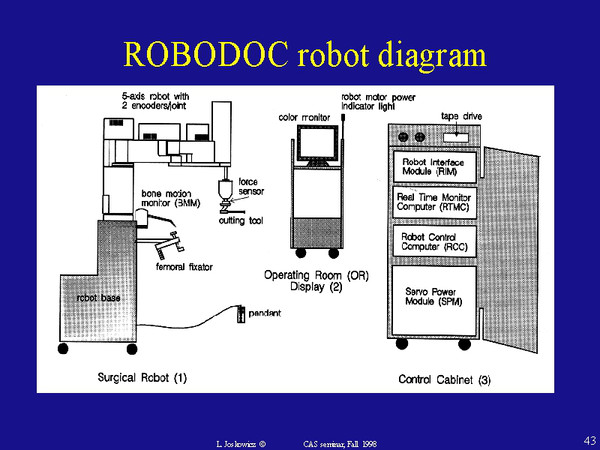
該系統(tǒng)能夠完成一系列的骨科手術(shù),如全髖關(guān)節(jié)置換術(shù)及全膝關(guān)節(jié)置換術(shù)(THA & TKA),也用于了全膝關(guān)節(jié)置換翻修術(shù)(RTKA),其包括兩個(gè)組件:
一個(gè)是配備了三維外科手術(shù)前規(guī)劃專(zhuān)有軟件的電腦工作站 ORTHODOC(R)。
以及一個(gè)用于髖、膝置換術(shù)精確空腔和表面處理的電腦操控外科機(jī)器人 ROBODOC(R) Surgical Assistant。
該設(shè)備已經(jīng)廣泛用于全球20,000多例外科手術(shù)。 德國(guó)Orto Maquet公司在1997年推出了CASPAR手術(shù)系統(tǒng),該系統(tǒng)用于THA&TKA中的骨骼磨削,以及前交叉韌帶重建術(shù)的隧道入點(diǎn)定位,磨削精度達(dá)到了0.1 mm,在歐洲一些醫(yī)院里得到應(yīng)。

牙科輔助機(jī)器人是手術(shù)機(jī)器人另一個(gè)細(xì)分市場(chǎng)。目前有牙齒美容機(jī)器人和義齒機(jī)器人。
義齒機(jī)器人利用圖像、圖形技術(shù)來(lái)獲取生成無(wú)牙頜患者的口腔軟硬組織計(jì)算機(jī)模型,利用自行研制的非接觸式三維激光掃描測(cè)量系統(tǒng)來(lái)獲取患者無(wú)牙頜骨形態(tài)的幾何參數(shù),采用專(zhuān)家系統(tǒng)軟件完成全口義齒人工牙列的計(jì)算機(jī)輔助統(tǒng)計(jì)。
Sinora齒雕機(jī)器人是一款比較典型的牙齒美容機(jī)器人,其突破了傳統(tǒng)的牙齒修復(fù)方法,利用數(shù)字化口腔修復(fù)網(wǎng)絡(luò)平臺(tái),經(jīng)3D智能數(shù)字化技術(shù)系統(tǒng)直接設(shè)計(jì),避免因材料或操作造成的誤差,不會(huì)發(fā)生規(guī)定混合物,印模和設(shè)定時(shí)間有錯(cuò)誤或不符的現(xiàn)象,從診斷、拍攝、設(shè)計(jì)、制作、試戴在一個(gè)區(qū)域內(nèi)完成,一氣呵成。例如過(guò)去需要一周時(shí)間來(lái)制作的全瓷牙,現(xiàn)在僅需要1小時(shí)左右就能完成,“純”打磨時(shí)間僅需要8-10分鐘。是目前最有效、最安全的牙齒美容技術(shù)。
胃鏡機(jī)器人和手術(shù)機(jī)器人同屬醫(yī)療機(jī)器人,只是兩者以不同的方式進(jìn)行“手術(shù)”而已。目前,胃鏡機(jī)器人以胃鏡膠囊機(jī)器人為主。患者只需吞下一顆普通膠囊藥物大小的膠囊內(nèi)鏡機(jī)器人,醫(yī)生就能檢查胃和小腸。
該遙控膠囊內(nèi)鏡機(jī)器人集成了各種各樣的傳感器,采用獨(dú)創(chuàng)的磁場(chǎng)控制技術(shù),把膠囊內(nèi)鏡變成了“有眼有腳”的機(jī)器人。由于其體積很小,進(jìn)入體內(nèi)毫無(wú)異物感與不適感,消除患者緊張、焦慮情緒,極大提高了受檢者對(duì)檢查的耐受性。
全球研發(fā)情況
據(jù)WinterGreen Research報(bào)告,手術(shù)機(jī)器人市場(chǎng)規(guī)模在2014年為32億美元,報(bào)告表示目前北美市場(chǎng)目前為最大市場(chǎng),而由于政府醫(yī)療投入加大,醫(yī)療系統(tǒng)重組和人們對(duì)微創(chuàng)手術(shù)意識(shí)加強(qiáng),未來(lái)市場(chǎng)重心將逐漸往亞洲市場(chǎng)轉(zhuǎn)移。
并且,伴隨著下一代設(shè)備、系統(tǒng)和器械的發(fā)布,手術(shù)機(jī)器人將從目前的大型開(kāi)放手術(shù),覆蓋到身體中的微小部分。預(yù)計(jì)2021年將達(dá)到200億美元。
近20年來(lái),伴隨著技術(shù)的突破和醫(yī)療水平的前進(jìn),手術(shù)機(jī)器人已完成了三次升級(jí),從單臂機(jī)器人伊索到三臂機(jī)器人宙斯,直至最先進(jìn)的四臂機(jī)器人達(dá)芬奇。
達(dá)芬奇系統(tǒng)由美國(guó)Intuitive Surgical(ISRG)公司開(kāi)發(fā)和制造,1999年獲得歐洲CE市場(chǎng)認(rèn),次年被FDA正式批準(zhǔn)投入使用。此手術(shù)系統(tǒng)最初主要用于泌尿外科的微創(chuàng)手術(shù),例如前列腺切除手術(shù),現(xiàn)在被越來(lái)越多地應(yīng)用于心外科,婦科以及小兒外科等外科微創(chuàng)手術(shù)。
根據(jù)IFR發(fā)布的統(tǒng)計(jì)數(shù)據(jù), 2013年全球外科手術(shù)輔助機(jī)器人總銷(xiāo)售額達(dá)14.95億美元,其中達(dá)芬奇機(jī)器人全球銷(xiāo)售額達(dá) 6.33億美元,占比42.43%。截至2014年底,全球共裝機(jī)達(dá)芬奇機(jī)器人3266臺(tái),其中美國(guó)2223臺(tái),歐洲549臺(tái),亞洲350臺(tái),我國(guó)內(nèi)地共29臺(tái),其中9臺(tái)在北京。

手術(shù)機(jī)器人系統(tǒng)開(kāi)發(fā)者除了美國(guó)Intuitive Surgical公司外,還有剛剛進(jìn)入手術(shù)機(jī)器人的老牌醫(yī)療公司Stryker。 Stryker公司是全球骨科356億美元市場(chǎng)中最大的公司之一,自從Homer Stryker醫(yī)生于1941年研制并生產(chǎn)第一臺(tái)產(chǎn)品至今,已擁有30家現(xiàn)代化工廠。公司產(chǎn)品涉及關(guān)節(jié)臵換、創(chuàng)傷、顱面、脊柱、手術(shù)設(shè)備、神經(jīng)外科、耳鼻喉、介入性疼痛管理、微創(chuàng)手術(shù)、導(dǎo)航手術(shù)、智能化手術(shù)室及網(wǎng)絡(luò)通訊、生物科技、醫(yī)用床、急救推床等。
由于業(yè)績(jī)良好,史賽克公司分別被美國(guó)著名的《財(cái)富》雜志及《Business Week》評(píng)為財(cái)富500強(qiáng)公司及全美50大醫(yī)療公司之一。 2014年,公司營(yíng)業(yè)收入96.75億美元,同比增加7.25%;營(yíng)業(yè)利潤(rùn)22.26億元,同比增加5.50%。此外,公司研發(fā)投入穩(wěn)步增加,占營(yíng)業(yè)收入比重保持5%-6%。
2013年,Stryker以16.5億美元收購(gòu)Mako外科治療公司及其相關(guān)核心技術(shù)。Mako總部位于佛羅里達(dá)州,其主打產(chǎn)品包括Makoplasty全髖關(guān)節(jié)臵換系統(tǒng)等。MAKOplasty由具有高精確性的RIO機(jī)械臂系統(tǒng)和創(chuàng)新性的髖膝關(guān)節(jié)假體系統(tǒng)組成,二者突破了傳統(tǒng)工具的限制,用微創(chuàng)的手術(shù)方式,精確植入假體,恢復(fù)自然的髖關(guān)節(jié)和膝關(guān)節(jié)。
MAKOplasty膝關(guān)節(jié)系統(tǒng)針對(duì)早到中期膝關(guān)節(jié)骨性關(guān)節(jié)炎患者,可進(jìn)行單間室或多間室的假體臵換。允許醫(yī)生術(shù)中實(shí)時(shí)調(diào)整膝關(guān)節(jié)力線和軟組織平衡。并通過(guò)微創(chuàng)的手術(shù)方式保留更多骨質(zhì)和組織,病人恢復(fù)更快。 MAKOplasty髖關(guān)節(jié)臵換手術(shù)可以通過(guò)機(jī)械臂精確限定關(guān)節(jié)銼進(jìn)入的深度并指導(dǎo)方向和角度,從而達(dá)到手術(shù)更加精確和安全的目的。
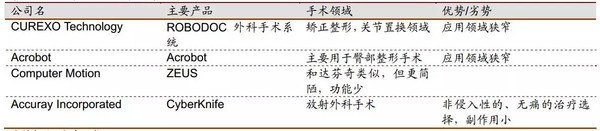
另外,國(guó)際上一些公司已經(jīng)開(kāi)始把注意力集中在眼科、神經(jīng)外科、骨科這些達(dá)芬奇系統(tǒng)還未占領(lǐng)的領(lǐng)域,例如CUREXO Technology的ROBODOC外科手術(shù)系統(tǒng)、英國(guó)Acrobot公司的外科醫(yī)療手術(shù)系統(tǒng)等。以上提到的手術(shù)機(jī)器人由于專(zhuān)攻市場(chǎng)小、設(shè)備昂貴等缺陷使他們未能在市場(chǎng)上受到特別關(guān)注,但也都是手術(shù)機(jī)器人商品化的成功案例。
國(guó)內(nèi)研發(fā)情況
由于目前外科手術(shù)機(jī)器人生產(chǎn)商的技術(shù)和市場(chǎng)壟斷,使得手術(shù)機(jī)器人的購(gòu)置費(fèi)用高、手術(shù)成本高、維護(hù)費(fèi)用高。這就直接導(dǎo)致我國(guó)醫(yī)院手術(shù)機(jī)器人的普及率遠(yuǎn)低于歐美,也不及亞洲日、韓等近鄰。
目前,國(guó)內(nèi)研究人員正在加緊研制各種手術(shù)機(jī)器人及其輔助設(shè)備、耗材。從長(zhǎng)遠(yuǎn)看,當(dāng)前的手術(shù)機(jī)器人技術(shù)和市場(chǎng)的壟斷地位可能被打破,手術(shù)機(jī)器人使用成本的下降是必然趨勢(shì)。我國(guó)自主研發(fā)手術(shù)機(jī)器人領(lǐng)域起步較晚,仍處于試驗(yàn)領(lǐng)域。主要有以下幾個(gè)研究機(jī)構(gòu):
a. 海軍總醫(yī)院與北京航天航空大學(xué)聯(lián)合開(kāi)發(fā)的機(jī)器人系統(tǒng)CRAS(Computer and Robot Assisted Surgery,CRAS)。CRAS是國(guó)內(nèi)手術(shù)機(jī)器人系統(tǒng)的先行者,已完成第五代的研制和臨床應(yīng)用。該系統(tǒng)系統(tǒng)選用PUMA260、262機(jī)器人作為系統(tǒng)輔助操作的執(zhí)行機(jī)構(gòu)。
第一代機(jī)器人于1997年5月首次應(yīng)用于臨床。第二代1999年研制成功,實(shí)現(xiàn)了無(wú)框架立體定向手術(shù)。第五代機(jī)器人除了前四代機(jī)器人的特點(diǎn)外,自動(dòng)定位功能更加先進(jìn),實(shí)現(xiàn)了視覺(jué)自動(dòng)定位,使手術(shù)誤差更小,手術(shù)操作更加快捷安全。該系統(tǒng)能通過(guò)互聯(lián)網(wǎng)實(shí)施遠(yuǎn)程操作手術(shù)。
2005年12月12日,在北京與延安之間利用互聯(lián)網(wǎng)成功進(jìn)行了2例立體定向手術(shù)。雖然如此,CARS手術(shù)機(jī)器人在擴(kuò)大適用范圍和實(shí)用性方面還是有許多問(wèn)題需要解決。
b.2013年11月,國(guó)家“863”計(jì)劃資助項(xiàng)目——“微創(chuàng)腹腔外科手術(shù)機(jī)器人系統(tǒng)”,由哈爾濱工業(yè)大學(xué)機(jī)器人研究所研制成功,并通過(guò)國(guó)家“863”計(jì)劃專(zhuān)家組的驗(yàn)收。
據(jù)哈工大機(jī)器人研究所的研發(fā)人員介紹,國(guó)產(chǎn)微創(chuàng)腹腔外科手術(shù)機(jī)器人系統(tǒng)具有我國(guó)自主知識(shí)產(chǎn)權(quán),研究人員針對(duì)微創(chuàng)外科手術(shù)的多種術(shù)式,在手術(shù)機(jī)器人系統(tǒng)的機(jī)械設(shè)計(jì)、主從控制算法、三維(3D)腹腔鏡與系統(tǒng)集成等關(guān)鍵技術(shù)上都進(jìn)行了重要突破,并申請(qǐng)了多項(xiàng)國(guó)家發(fā)明專(zhuān)利。
這個(gè)項(xiàng)目的突破被看做是打破了進(jìn)口達(dá)芬奇手術(shù)機(jī)器人的技術(shù)壟斷,將加快實(shí)現(xiàn)國(guó)產(chǎn)微創(chuàng)手術(shù)機(jī)器人輔助外科手術(shù)。
c. 2014年04月,中南大學(xué)湘雅三醫(yī)院順利完成了3例國(guó)產(chǎn)機(jī)器人手術(shù),這是我國(guó)自主研制的手術(shù)機(jī)器人系統(tǒng)首次運(yùn)用于臨床。該手術(shù)機(jī)器人就是天津大學(xué)研發(fā)的具有自主知識(shí)產(chǎn)權(quán)的微創(chuàng)外科手術(shù)機(jī)器人系統(tǒng)——“妙手S”。
“妙手S”系統(tǒng)較國(guó)外同類(lèi)產(chǎn)品有三點(diǎn)技術(shù)優(yōu)勢(shì),第一是運(yùn)用了微創(chuàng)手術(shù)器械多自由度絲傳動(dòng)解耦設(shè)計(jì)技術(shù),解決了運(yùn)動(dòng)耦合問(wèn)題,固定、防滑、防松,更有利于精度保持。第二是實(shí)現(xiàn)了從操作手的可重構(gòu)布局原理與實(shí)現(xiàn)技術(shù),使機(jī)器人的“胳膊”更輕,更適應(yīng)手術(shù)的需要。第三是運(yùn)用系統(tǒng)異體同構(gòu)控制模型構(gòu)建技術(shù),解決了立體視覺(jué)環(huán)境下手-眼-器械運(yùn)動(dòng)的一致性。
據(jù)了解,“妙手S”外科手術(shù)機(jī)器人系統(tǒng)將有望3年內(nèi)投產(chǎn)。
據(jù)前瞻產(chǎn)業(yè)研究院發(fā)布的《2015-2020 年中國(guó)醫(yī)療器械行業(yè)市場(chǎng)需求預(yù)測(cè)與投資戰(zhàn)略規(guī)劃分析報(bào)告》,2014 年國(guó)內(nèi)醫(yī)療器械市場(chǎng)總規(guī)模將近2556 億元,但進(jìn)口醫(yī)療器械的進(jìn)口金額占據(jù)中體市場(chǎng)份額40%,其中中高端市場(chǎng)上的醫(yī)療器械幾乎被外國(guó)廠商包攬,占比超過(guò)70%。目前,國(guó)產(chǎn)手術(shù)機(jī)器人還大多處于研發(fā)或臨床試驗(yàn)階段,距離商業(yè)化推廣還有一定的距離。
以歷史看未來(lái)
從第一臺(tái)手術(shù)機(jī)器人誕生到現(xiàn)在,自動(dòng)化手術(shù)已經(jīng)走過(guò)了近30個(gè)年頭。當(dāng)1985年第一臺(tái)手術(shù)機(jī)器人Puma 560生產(chǎn)出來(lái)的時(shí)候,生產(chǎn)該機(jī)器人的公司出于安全考慮,曾經(jīng)禁止該機(jī)器人被用于手術(shù)。但現(xiàn)在,最先進(jìn)的手術(shù)機(jī)器人系統(tǒng)每年執(zhí)行著上萬(wàn)例各種手術(shù)。不禁讓人感嘆醫(yī)療技術(shù)發(fā)展如此之快。
現(xiàn)在,我們?nèi)匀缓芎闷妫瑱C(jī)器人手術(shù)的未來(lái)將會(huì)是怎樣的情景呢?
現(xiàn)在,全球各地的醫(yī)生們正期盼著遠(yuǎn)程醫(yī)療和遠(yuǎn)程手術(shù)的發(fā)展,那樣的話,一個(gè)醫(yī)生就可以在另一個(gè)城市、另一個(gè)州或者另一個(gè)大陸為患者做手術(shù)。這意味著我們可以在世界的不同地方建立一些手術(shù)中心,醫(yī)生可以去一個(gè)手術(shù)中心,坐在控制臺(tái)上,而患者則在另一個(gè)手術(shù)中心,他只需要操控機(jī)器人,便可以為患者動(dòng)手術(shù)了。
實(shí)際上,2001年的時(shí)候,紐約和法國(guó)的斯特拉斯堡就通過(guò)機(jī)器人完成了一次遠(yuǎn)程手術(shù)。這臺(tái)具有開(kāi)創(chuàng)性特質(zhì)的手術(shù)被成為“林德伯格手術(shù)”。雖然手術(shù)成功完成,但是影像的傳輸和手術(shù)操作卻出現(xiàn)了延遲的現(xiàn)象,這使得遠(yuǎn)程手術(shù)難以實(shí)現(xiàn)。然而,隨著網(wǎng)速的增長(zhǎng)和帶寬變得更便宜,延遲的現(xiàn)象毫無(wú)疑問(wèn)會(huì)得到改善。
我相信,在未來(lái)我們會(huì)擁有遠(yuǎn)程醫(yī)療的條件,醫(yī)生可以為世界上其他地方的患者動(dòng)手術(shù),我并不認(rèn)為那是個(gè)遙不可及的科學(xué)幻想,我認(rèn)為在我有生之年,這將成為現(xiàn)實(shí)。并且,遠(yuǎn)程醫(yī)療的發(fā)展同樣意味著醫(yī)生之間更高層面的競(jìng)爭(zhēng)。這會(huì)提高外科醫(yī)生的準(zhǔn)入門(mén)檻,讓他們?cè)谧约旱念I(lǐng)域變的最為出色。
另外一種可能是,在未來(lái)我們可以只通過(guò)單一的創(chuàng)口為患者進(jìn)行手術(shù),或許可以通過(guò)肚臍,插入一支蛇形的機(jī)械臂。而現(xiàn)在,為了能夠方便機(jī)械臂進(jìn)入身體,患者的身體上會(huì)留下幾處較小的創(chuàng)口。
這項(xiàng)技術(shù)的繼續(xù)發(fā)展將意味著,醫(yī)生只需要在患者身體上開(kāi)一個(gè)小洞,然后在插入一支蛇形機(jī)械臂就行了,那才是真正的顛覆性技術(shù),這可能會(huì)永遠(yuǎn)改變手術(shù)的性質(zhì),這些真的很酷,不是嗎?


