







更復雜的環境需要更強大的感知
導航技術變革推動移動機器人應用加速
核心傳感器是決定移動機器人性能的關鍵
性價比提升,3D激光雷達應用加速
工業場景:無人叉車廠商的率先試水

2023年5月,未來機器人重磅推出新一代產品——VNST20托盤搬運無人叉車,VNST20通過一顆3D激光雷達,集成定位、感知、防護功能一體,在提升叉車感知定位精度同時,增強車身安全防護功能。VNST20托盤搬運無人叉車重復定位精度可達到±10mm,±0.5°;重復放貨自適應精度達到±10mm,±0.5°。

激光雷達小型化更便于機器人集成應用。據覽沃相關負責人介紹,Mid-360體積僅有一個網球的大小,相較于覓道系列上一款產品Mid-70縮小近60%,且大部分體積可被嵌入式隱藏,需外露的半球形窗口直徑僅為4.5厘米,高度為2.5厘米。小巧的機身不僅為無人叉車設計預留更多空間同時也可以進一步美化車體外觀。
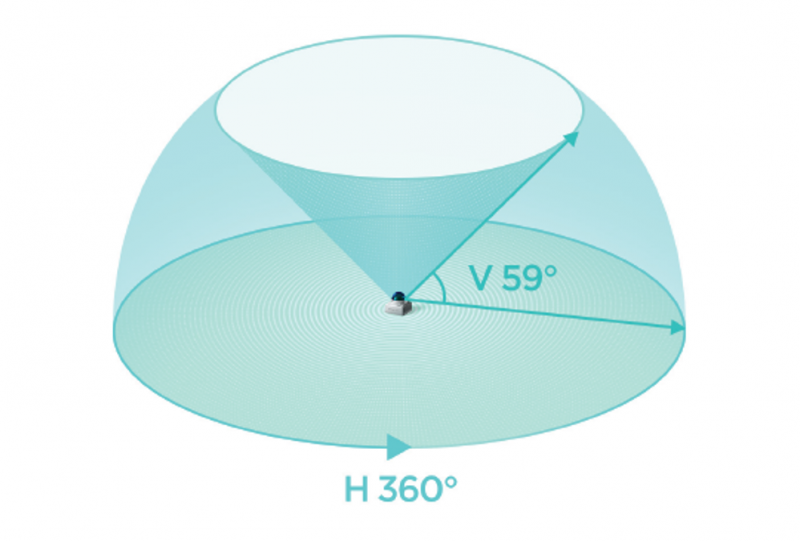
隨著移動機器人被越來越大規模應用,覽沃還考慮到了雷達之間的對射以及戶外復雜光環境容易帶來信號干擾的情況。Mid-360引入了抗干擾的設計,即便在室內多臺激光雷達信號混行的環境中,仍能保證互不干擾,穩定運行。同時,Mid-360能抵抗100Klux陽光直射,在室外強光環境下的性能與室內一致出色,可以保障從室外到室外跨場景運行無縫銜接。
家庭商用領域:去RTK的有效驗證

目前,業內智能割草機器人在定位方面主要有兩種技術方案,一是基于慣性導航的埋線式方案,二是非埋線式方案。埋線式方案是當下主流的技術方案,該方案的優勢是成本較低,但缺點在于無法實現精準定位,成本還會隨著草坪面積增大而增加,且耗時長、布置靈活性差。非埋線方案則一般是依托RTK衛星定位技術與并綜合IMU和視覺等其他傳感器,來提升割草機的靈活性,但也會面臨基站信號易存在遮擋,可能導致定位存在偏差,從而產生漏割、偏移預設路徑等問題。
突破邊界 走向智能感知新時代

未來,全生命周期SLAM、動態目標濾除、多傳感器融合、語義分割與識別等是移動機器人進一步提升導航能力的主要路徑。在這一過程中,相信3D導航技術的應用將會不斷增多。


