









大約從 2010 年開始,意大利技術研究所(IIT)的 Dynamic Legged Systems Lab(DLS)就一直致力于研究液壓驅動四足機器人,昨日,IIT 推出了一款全面升級的四足機器人,名為 HyQReal。這款四足機器人體積很大、拉力十足、結實耐用并且性能強勁,IIT 想要測試一下 HyQReal 是否可以拉動一架 3 噸重的飛機。
結果顯示,這款機器人成功地拉動了一架小型客機:

HyQ 是一款液壓四足機器人,是 DLS 的旗艦平臺。自 2010 年展示以來,HyQ 展示出了各種各樣的動作,比如爬樓梯、爬煙囪、在崎嶇的地形上全方位小跑、用踏步反射小跑、跳躍等。
HyQReal 長 1.33m,高 0.9m,加上內部液壓系統和電池,它的重量為 130kg。這款機器人由一個鋁制防滾架以及凱夫拉爾、玻璃纖維和塑料組成的外殼保護。機器人還有定制的橡膠墊腳,當前行困難時可提供牽引力。機器人載有兩臺計算機,一臺指引視覺方向,一臺用于控制。
昨日,Dynamic Legged Systems Lab 負責人 Claudio Semini 在 ICRA 大會舉辦了一場研討會,詳細介紹了 HyQReal 的整體性能。如下圖所示:
在液壓系統方面,IIT 和 Moog 合作,使用他們的集成智能致動器,每個致動器都有 3D 打印的鈦裝置。該裝置包含所有傳感器、電子器件和流體路徑。HyQReal 有兩個獨立的液壓泵,一個驅動前腿,一個驅動后腿。電池(重 15kg)大概可以用兩個小時,雖然 IIT 還沒有做過續航測試。由于致動器大部分是密封的,所以 HyQReal 是防水防塵的,可以在噴水或灑滿沙子的情況下保持移動。
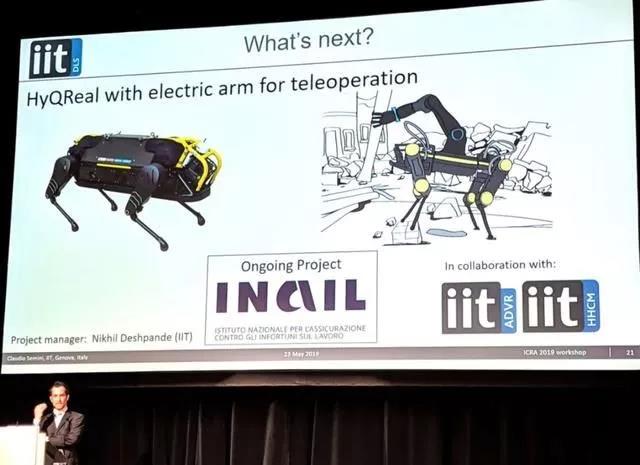
其實,拉飛機并不是 HyQReal 的主要工作。更廣泛一點來說,它是為了「在緊急情況下支援人類」而開發的,應該是「災難響應、農業、設施停運和檢查」的理想選擇。但目前它仍是一款研究型機器人,盡管這份研究是基于 IIT 對之前的 HyQ 所做的工作。IIT 希望接下來能夠加快研究,以實現其工業化。(文章來源于機器之心)


